computes a normal vector field over a digitized 3D implicit surface for several estimators.
Usage: ./estimators/generic3dNormalEstimators -p <polynomial> [options]
Computes a normal vector field over a digitized 3D implicit surface for several estimators (II|VCM|Trivial|True), specified with -e. You may add Kanungo noise with option -N. These estimators are compared with ground truth. You may then: 1) visualize the normals or the angle deviations with -V (if WITH_QGL_VIEWER is enabled), 2) outputs them as a list of cells/estimations with -n, 3) outputs them as a ImaGene file with -O, 4) outputs them as a NOFF file with -O, 5) computes estimation statistics with option -S.
Allowed options are :
Example of implicit surface (specified by -p):
- ellipse : 90-3*x^2-2*y^2-z^2
- torus : -1*(x^2+y^2+z^2+6*6-2*2)^2+4*6*6*(x^2+y^2)
- rcube : 6561-x^4-y^4-z^4
- goursat : 8-0.03*x^4-0.03*y^4-0.03*z^4+2*x^2+2*y^2+2*z^2
- distel : 10000-(x^2+y^2+z^2+1000*(x^2+y^2)*(x^2+z^2)*(y^2+z^2))
- leopold : 100-(x^2*y^2*z^2+4*x^2+4*y^2+3*z^2)
- diabolo : x^2-(y^2+z^2)^2
- heart : -1*(x^2+2.25*y^2+z^2-1)^3+x^2*z^3+0.1125*y^2*z^3
- crixxi : -0.9*(y^2+z^2-1)^2-(x^2+y^2-1)^3
Implemented estimators (specified by -e):
- True : supposed to be the ground truth for computations. Of course, it is only approximations.
- VCM : normal estimator by digital Voronoi Covariance Matrix. Radii parameters are given by -R, -r.
- II : normal estimator by Integral Invariants. Radius parameter is given by -r.
- Trivial : the normal obtained by average trivial surfel normals in a ball neighborhood. Radius parameter is given by -r.
- Note
- :
- This is a normal direction evaluator more than a normal vector evaluator. Orientations of normals are deduced from ground truth. This is due to the fact that II and VCM only estimates normal directions.
- This tool only analyses one surface component, and one that contains at least as many surfels as the width of the digital bounding box. This is required when analysing noisy data, where a lot of the small components are spurious. The drawback is that you cannot analyse the normals on a surface with several components.
Example:
- Example of normal comparisons: You can estimate the normal vectors and compare the error with the true normals (option -V AngleDeviation): You should obtain such a result:# apply the Integral Invariant estimator (options -e II -r 8 ):$ generic3dNormalEstimators -p "10000-(x^2+y^2+z^2+1000*(x^2+y^2)*(x^2+z^2)*(y^2+z^2))" -a -10 -A 10 -e II -r 8 -V AngleDeviation -g 0.05# apply the Voronoi Covariance Measure based estimator (options -e VCM -r 8 ):$ generic3dNormalEstimators -p "10000-(x^2+y^2+z^2+1000*(x^2+y^2)*(x^2+z^2)*(y^2+z^2))" -a -10 -A 10 -e VCM -R 20 -r 8 -V AngleDeviation -g 0.05# to display source digital surface : visualize the normals and tape Key E to export surface (in exportedMesh.off)$ generic3dNormalEstimators -p "10000-(x^2+y^2+z^2+1000*(x^2+y^2)*(x^2+z^2)*(y^2+z^2))" -a -10 -A 10 -e VCM -R 20 -r 8 -V Normals -g 0.05# visualize generated file:$ meshViewer -i exportedMesh.off
type visualization digital surface 
VCM angle-deviation 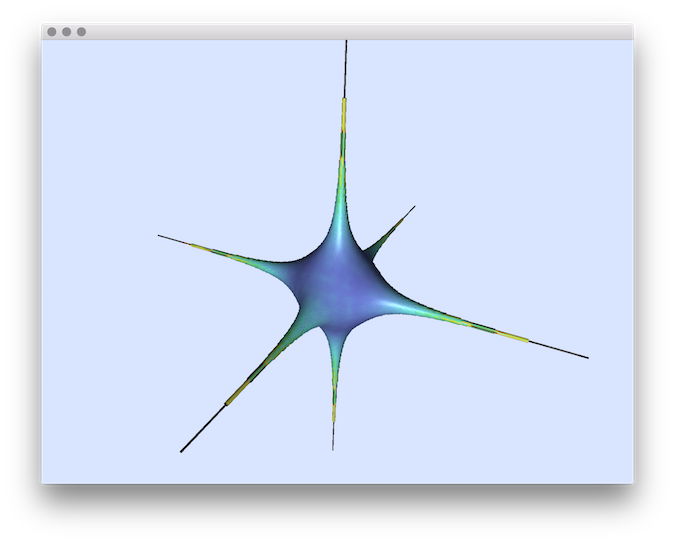
II angle-deviation 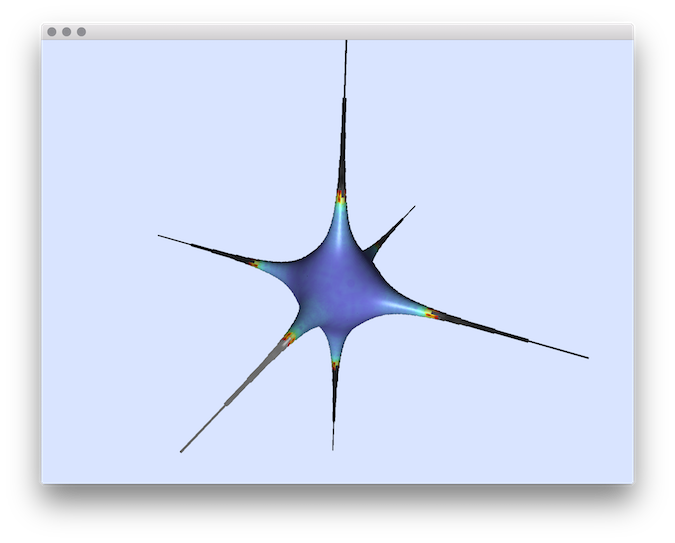
- Example of normal visualization with noise add: This tool allows to add some noise on initial shape (option -N) and it is also possiblt to visualize the source shape by using the resulting normals: # apply the Integral Invariant estimator (options -e II -r 6 ):generic3dNormalEstimators -p "100-(x^2*y^2*z^2+4*x^2+4*y^2+3*z^2)" -a -10 -A 10 -e II -r 6 -V Normals -g 0.1 -N 0.3# apply the Voronoi Covariance Measure based estimator (options -e VCM -r 8 ):generic3dNormalEstimators -p "100-(x^2*y^2*z^2+4*x^2+4*y^2+3*z^2)" -a -10 -A 10 -e VCM -R 10 -r 5 -V Normals -g 0.1 -N 0.3# apply the true normals:./estimators/generic3dNormalEstimators -p "100-(x^2*y^2*z^2+4*x^2+4*y^2+3*z^2)" -a -10 -A 10 -e True -V Normals -g 0.1 -N 0.3# to display source digital surface : tape Key E on previous displays to export surface (in exportedMesh.off)# visualize generated file:$ meshViewer -i exportedMesh.off
You should obtain such a result:
| type | visualization |
|---|---|
| digital surface |  |
| VCM estimator |  |
| II estimator |  |
| True Normals |  |
- See also
- generic3dNormalEstimators.cpp
