
This example shows the recognition of a simple digital plane with the COBA algorithm (class COBANaivePlaneComputer). Green points belong to the naive plane. There is no naive plane containing the green points and any one of the red points.
- See also
- How to recognize a plane ?
$ ./examples/io/viewers/viewer3D-7-planes
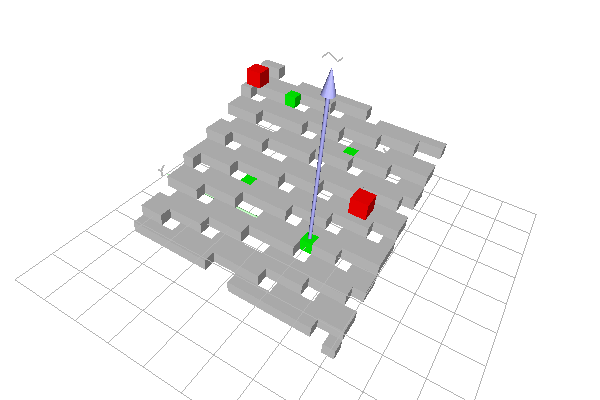
Piece of naive plane containing the four green points. There is no naive plane containing also any one of the red points.
#include <cstdlib>
#include <iostream>
#include "DGtal/base/Common.h"
#include "DGtal/helpers/StdDefs.h"
#include "DGtal/io/viewers/Viewer3D.h"
#include "DGtal/geometry/surfaces/COBANaivePlaneComputer.h"
using namespace std;
using namespace DGtal;
// Standard services - public :
template <typename Viewer3D, typename Domain, typename Predicate>
void
{
itB != itE; ++itB )
{
if ( pred( *itB ) )
viewer << *itB;
}
}
{
using namespace Z3i;
QApplication application(argc,argv);
unsigned int nbok = 0;
unsigned int nb = 0;
typedef PlaneComputer::Primitive Primitive;
PlaneComputer plane;
plane.init( 2, 100, 1, 1 );
Point pt0( 0, 0, 0 );
bool pt0_inside = plane.extend( pt0 );
<< std::endl;
Point pt1( 8, 1, 3 );
bool pt1_inside = plane.extend( pt1 );
++nb, nbok += pt1_inside == true ? 1 : 0;
<< " Plane=" << plane << std::endl;
Point pt2( 2, 7, 1 );
bool pt2_inside = plane.extend( pt2 );
++nb, nbok += pt2_inside == true ? 1 : 0;
<< " Plane=" << plane << std::endl;
Point pt3( 0, 5, 12 );
bool pt3_inside = plane.extend( pt3 );
++nb, nbok += pt3_inside == false ? 1 : 0;
<< " Plane=" << plane << std::endl;
Point pt4( -5, -5, 10 );
bool pt4_inside = plane.extend( pt4 );
++nb, nbok += pt4_inside == false ? 1 : 0;
<< " Plane=" << plane << std::endl;
bool pt5_inside = plane.extend( pt5 );
++nb, nbok += pt5_inside == true ? 1 : 0;
<< " Plane=" << plane << std::endl;
bool pt6_inside = plane.extend( pt6 );
++nb, nbok += pt6_inside == true ? 1 : 0;
<< " Plane=" << plane << std::endl;
Primitive strip = plane.primitive();
trace.info() << "strip=" << strip
<< " axis=" << strip.mainAxis()
<< " axiswidth=" << strip.axisWidth()
<< " diag=" << strip.mainDiagonal()
<< " diagwidth=" << strip.diagonalWidth()
<< std::endl;
++nb, nbok += strip.axisWidth() < 1.0 ? 1 : 0;
<< std::endl;
++nb, nbok += strip.diagonalWidth() < sqrt(3.0) ? 1 : 0;
<< std::endl;
trace.endBlock();
typedef Viewer3D<> MyViewer;
MyViewer viewer;
viewer.show();
Color red( 255, 0, 0 );
Color green( 0, 255, 0 );
Color grey( 200, 200, 200 );
viewer << ( pt1_inside ? CustomColors3D( green, green ) : CustomColors3D( red, red ) ) << pt1;
viewer << ( pt2_inside ? CustomColors3D( green, green ) : CustomColors3D( red, red ) ) << pt2;
viewer << ( pt3_inside ? CustomColors3D( green, green ) : CustomColors3D( red, red ) ) << pt3;
viewer << ( pt4_inside ? CustomColors3D( green, green ) : CustomColors3D( red, red ) ) << pt4;
viewer << ( pt5_inside ? CustomColors3D( green, green ) : CustomColors3D( red, red ) ) << pt5;
viewer << ( pt6_inside ? CustomColors3D( green, green ) : CustomColors3D( red, red ) ) << pt6;
viewer << CustomColors3D( grey, grey );
displayPredicate( viewer, domain, strip );
viewer << MyViewer::updateDisplay;
return application.exec();
}
// //
Aim: A class that contains the COBA algorithm (Emilie Charrier, Lilian Buzer, DGCI2008) for recognizi...
Definition: COBANaivePlaneComputer.h:130
void init(Dimension axis, InternalInteger diameter, InternalInteger widthNumerator=NumberTraits< InternalInteger >::ONE, InternalInteger widthDenominator=NumberTraits< InternalInteger >::ONE)
void beginBlock(const std::string &keyword="")
std::ostream & emphase()
std::ostream & info()
double endBlock()
Definition: Viewer3D.h:132
virtual void show()
Overload QWidget method in order to add a call to updateList() method (to ensure that the lists are w...
DGtal is the top-level namespace which contains all DGtal functions and types.
Definition: ClosedIntegerHalfPlane.h:49
STL namespace.
void displayPredicate(Viewer3D &viewer, const Domain &domain, const Predicate &pred)
Definition: viewer3D-7-planes.cpp:64