Loading...
Searching...
No Matches
geometry/volumes/standardDigitalPolyhedronBuilder3D.cpp
This example shows how to use the fully convex envelope to build a digital polyhedron from an arbitrary mesh. All faces have also the property that their points lies in the naive/standard plane defined by its vertices. It uses DigitalConvexity::relativeEnvelope for computations.
- See also
- Digital polyhedra
For instance, you may call it on object "lion-tri.obj" as
standardDigitalPolyhedronBuilder3D ../examples/samples/lion-tri.obj 0.5 31
The last parameter specifies whether you want to see vertices (1) in black, edges common to both faces (2) in magenta, part of edges that are only on one face (4) and (8) (red on one side, blue on the other) and faces (16) in grey, or any combination.
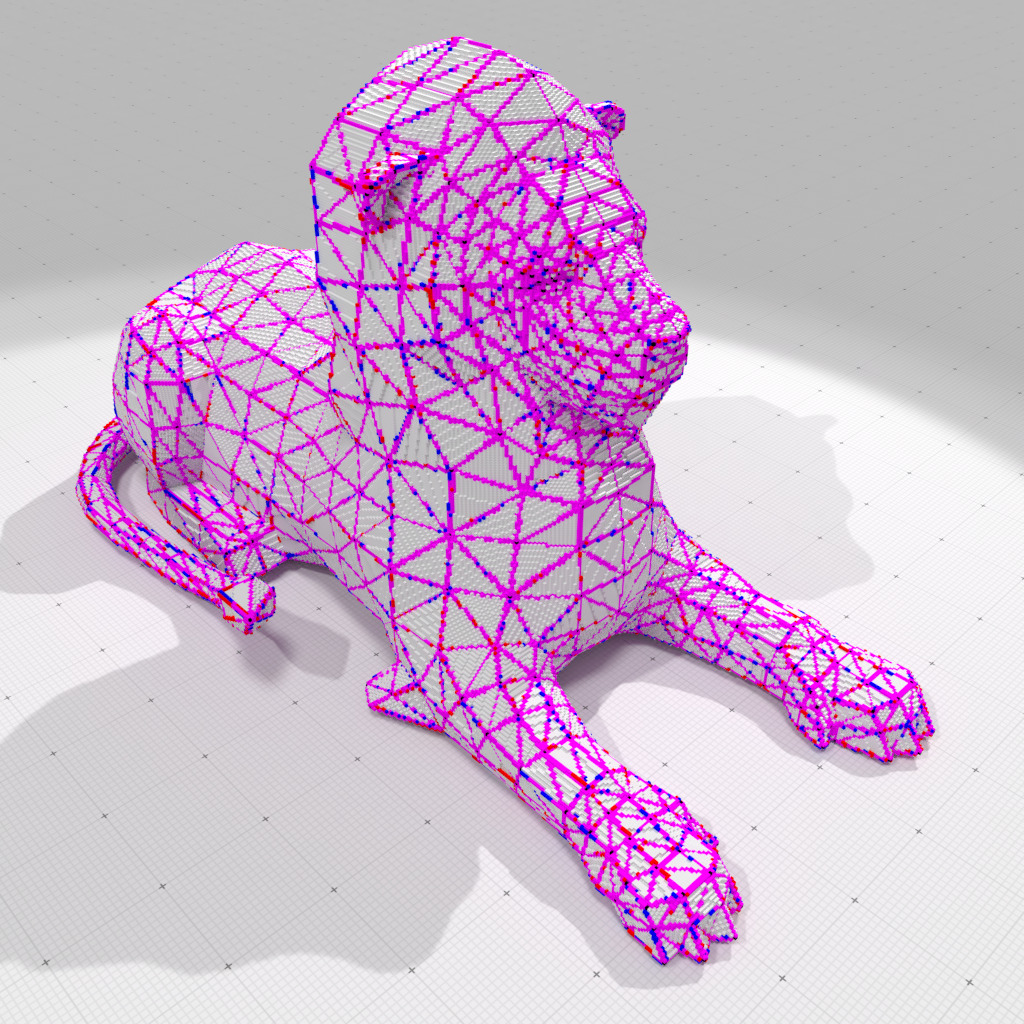
(Symmetric) standard Digital polyhedral model of 'lion-tri.obj' at gridstep 0.5 | 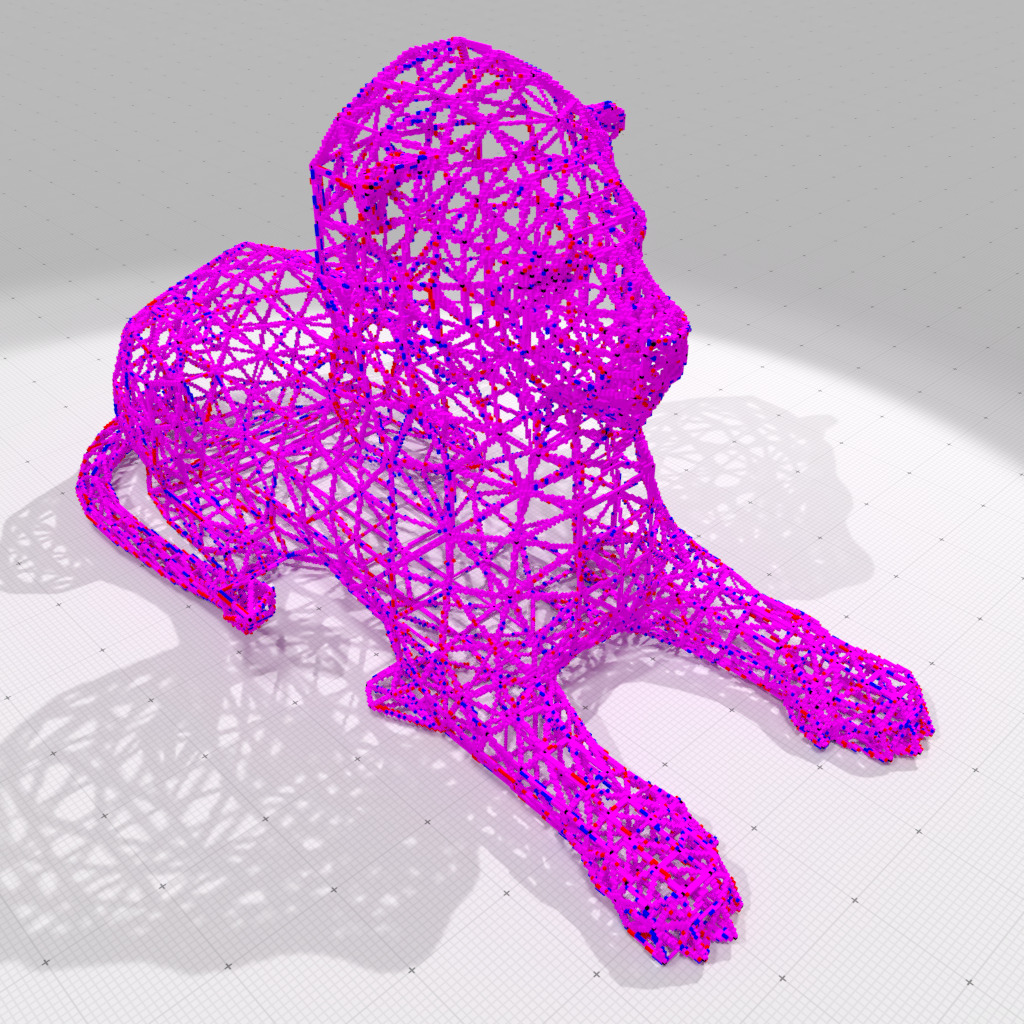
(Symmetric) standard Digital polyhedral model of 'lion-tri.obj' at gridstep 0.5 (vertices and edges only) |
namespace DGtal {
} // namespace DGtal {
#include <iostream>
#include <queue>
#include "DGtal/base/Common.h"
#include "DGtal/helpers/StdDefs.h"
#include "DGtal/io/viewers/PolyscopeViewer.h"
#include "DGtal/shapes/Shapes.h"
#include "DGtal/shapes/SurfaceMesh.h"
#include "DGtal/io/readers/SurfaceMeshReader.h"
#include "DGtal/geometry/volumes/DigitalConvexity.h"
#include "ConfigExamples.h"
using namespace std;
using namespace DGtal;
// Convenient class to represent different types of arithmetic planes as a predicate.
template < bool Naive, bool Symmetric >
{
}
{
auto r = N.dot( p );
}
};
// Choose your plane !
// typedef MedianPlane< true, false > Plane; //< Naive, thinnest possible
// typedef MedianPlane< true, true > Plane; //< Naive, Symmetric
// typedef MedianPlane< false, false > Plane; //< Standard
{
trace.info() << "\tComputes a digital polyhedron from an OBJ file" << std::endl;
trace.info() << "\t- input.obj: choose your favorite mesh" << std::endl;
trace.info() << "\t- h [==1]: the digitization gridstep" << std::endl;
trace.info() << "\t- view [==31]: display vertices(1), common edges(2), positive side f edges(4), negative side f edges (8), faces(16)" << std::endl;
string filename = examplesPath + "samples/lion.obj";
std::string fn = argc > 1 ? argv[ 1 ] : filename; //< vol filename
double h = argc > 2 ? atof( argv[ 2 ] ) : 1.0;
int view = argc > 3 ? atoi( argv[ 3 ] ) : 31;
// Read OBJ file
std::ifstream input( fn.c_str() );
if ( ! ok )
{
trace.error() << "Unable to read obj file : " << fn << std::endl;
return 1;
}
typedef PolyscopeViewer<Space,KSpace> MViewer;
MViewer viewer;
Point lo(-500,-500,-500);
Point up(500,500,500);
DigitalConvexity< KSpace > dconv( lo, up );
{
(Integer) round( p[ 1 ] ),
(Integer) round( p[ 2 ] ) );
vertices[ v ] = q;
}
std::set< Point > faces_set, pos_edges_set, neg_edges_set;
auto faceVertices = surfmesh.allIncidentVertices();
trace.beginBlock( "Checking face planarity" );
std::vector< Plane > face_planes;
face_planes.resize( surfmesh.nbFaces() );
bool planarity = true;
{
PointRange X;
for ( auto v : faceVertices[ f ] )
X.push_back( vertices[ v ] );
face_planes[ f ] = Plane( X[ 0 ], X[ 1 ], X[ 2 ] );
for ( size_t v = 3; v < X.size(); v++ )
if ( ! face_planes[ f ]( X[ v ] ) )
{
planarity = false; break;
}
}
trace.endBlock();
if ( ! planarity ) return 1;
trace.beginBlock( "Computing polyhedron" );
{
PointRange X;
for ( auto v : faceVertices[ f ] )
X.push_back( vertices[ v ] );
auto F = dconv.relativeEnvelope( X, face_planes[ f ], Algorithm::DIRECT );
faces_set.insert( F.cbegin(), F.cend() );
for ( size_t i = 0; i < X.size(); i++ )
{
PointRange Y { X[ i ], X[ (i+1)%X.size() ] };
if ( Y[ 1 ] < Y[ 0 ] ) std::swap( Y[ 0 ], Y[ 1 ] );
int idx1 = faceVertices[ f ][ i ];
int idx2 = faceVertices[ f ][ (i+1)%X.size() ];
// Variant (1): edges of both sides have many points in common
// auto A = dconv.relativeEnvelope( Y, face_planes[ f ], Algorithm::DIRECT );
// Variant (2): edges of both sides have much less points in common
bool pos = idx1 < idx2;
}
}
trace.endBlock();
std::vector< Point > face_points, common_edge_points, arc_points, final_arc_points ;
std::vector< Point > pos_edge_points, neg_edge_points, both_edge_points;
std::vector< Point > vertex_points = vertices;
std::sort( vertex_points.begin(), vertex_points.end() );
std::set_symmetric_difference( pos_edges_set.cbegin(), pos_edges_set.cend(),
neg_edges_set.cbegin(), neg_edges_set.cend(),
std::back_inserter( arc_points ) );
std::set_intersection( pos_edges_set.cbegin(), pos_edges_set.cend(),
neg_edges_set.cbegin(), neg_edges_set.cend(),
std::back_inserter( common_edge_points ) );
std::set_union( pos_edges_set.cbegin(), pos_edges_set.cend(),
neg_edges_set.cbegin(), neg_edges_set.cend(),
std::back_inserter( both_edge_points ) );
std::set_difference( faces_set.cbegin(), faces_set.cend(),
both_edge_points.cbegin(), both_edge_points.cend(),
std::back_inserter( face_points ) );
std::set_difference( pos_edges_set.cbegin(), pos_edges_set.cend(),
common_edge_points.cbegin(), common_edge_points.cend(),
std::back_inserter( pos_edge_points ) );
std::set_difference( neg_edges_set.cbegin(), neg_edges_set.cend(),
common_edge_points.cbegin(), common_edge_points.cend(),
std::back_inserter( neg_edge_points ) );
std::set_difference( common_edge_points.cbegin(), common_edge_points.cend(),
vertex_points.cbegin(), vertex_points.cend(),
std::back_inserter( final_arc_points ) );
auto total = vertex_points.size() + pos_edge_points.size()
+ neg_edge_points.size()
+ final_arc_points.size() + face_points.size();
trace.info() << "#vertex points=" << vertex_points.size() << std::endl;
trace.info() << "#pos edge points=" << pos_edge_points.size() << std::endl;
trace.info() << "#neg edge points=" << neg_edge_points.size() << std::endl;
trace.info() << "#arc points=" << final_arc_points.size() << std::endl;
trace.info() << "#face points=" << face_points.size() << std::endl;
trace.info() << "#total points=" << total << std::endl;
// display everything
Color colors[] =
if ( view & 0x1 )
{
viewer.drawColor( colors[ 0 ] );
viewer.drawColor( colors[ 0 ] );
for ( auto p : vertices ) viewer << p;
}
if ( view & 0x2 )
{
viewer.drawColor( colors[ 3 ] );
viewer.drawColor( colors[ 3 ] );
for ( auto p : final_arc_points ) viewer << p;
}
if ( view & 0x4 )
{
viewer.drawColor( colors[ 1 ] );
viewer.drawColor( colors[ 1 ] );
for ( auto p : pos_edge_points ) viewer << p;
}
if ( view & 0x8 )
{
viewer.drawColor( colors[ 2 ] );
viewer.drawColor( colors[ 2 ] );
for ( auto p : neg_edge_points ) viewer << p;
}
if ( view & 0x10 )
{
viewer.drawColor( colors[ 4 ] );
viewer.drawColor( colors[ 4 ] );
for ( auto p : face_points ) viewer << p;
}
viewer.show();
return 0;
}
// //
PointVector< dim, double > RealVector
Definition SpaceND.h:121
DGtal is the top-level namespace which contains all DGtal functions and types.
Definition ClosedIntegerHalfPlane.h:49
Trace trace
auto crossProduct(PointVector< 3, LeftEuclideanRing, LeftContainer > const &lhs, PointVector< 3, RightEuclideanRing, RightContainer > const &rhs) -> decltype(DGtal::constructFromArithmeticConversion(lhs, rhs))
Cross product of two 3D Points/Vectors.
std::pair< typename graph_traits< DGtal::DigitalSurface< TDigitalSurfaceContainer > >::vertex_iterator, typename graph_traits< DGtal::DigitalSurface< TDigitalSurfaceContainer > >::vertex_iterator > vertices(const DGtal::DigitalSurface< TDigitalSurfaceContainer > &digSurf)
STL namespace.
Definition testCountedConstPtrOrConstPtr.cpp:43
Aim: An helper class for reading mesh files (Wavefront OBJ at this point) and creating a SurfaceMesh.
Definition SurfaceMeshReader.h:64
MedianPlane()=default
bool operator()(const Point &p) const
Definition standardDigitalPolyhedronBuilder3D.cpp:109
MedianPlane & operator=(const MedianPlane &other)=default
void insert(VContainer1 &c1, LContainer2 &c2, unsigned int idx, double v)
Definition testIndexedListWithBlocks.cpp:52