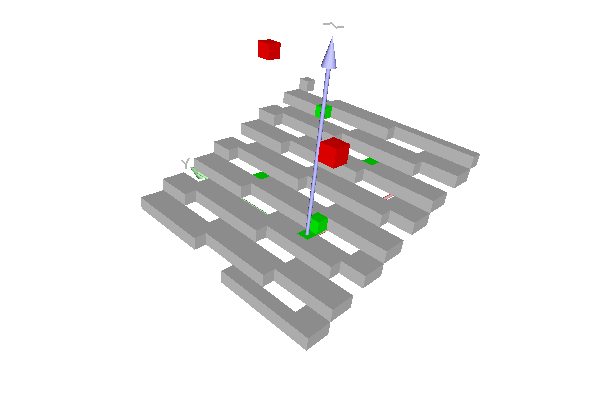
This example shows the recognition of a simple digital plane with the Chord algorithm (class DGtal::ChordNaivePlaneComputer). Green points belong to the naive plane. There is no naive plane containing the green points and any one of the red points.
#include <cstdlib>
#include <iostream>
#include "DGtal/base/Common.h"
#include "DGtal/helpers/StdDefs.h"
#include "DGtal/geometry/surfaces/ChordNaivePlaneComputer.h"
#include "DGtal/io/viewers/Viewer3D.h"
template <typename Viewer3D, typename Domain, typename Predicate>
void
{
for (
typename Domain::ConstIterator itB =
domain.begin(), itE =
domain.end();
itB != itE; ++itB )
{
if ( pred( *itB ) )
viewer << *itB;
}
}
int main(
int argc,
char** argv )
{
using namespace Z3i;
QApplication application(argc,argv);
trace.
beginBlock (
"Testing class ChordNaivePlaneComputer" );
unsigned int nbok = 0;
unsigned int nb = 0;
typedef PlaneComputer::Primitive Primitive;
PlaneComputer plane;
bool pt0_inside = plane.extend( pt0 );
trace.
info() <<
"(" << nbok <<
"/" << nb <<
") Plane=" << plane
<< std::endl;
bool pt1_inside = plane.extend( pt1 );
++nb; nbok += pt1_inside == true ? 1 : 0;
trace.
info() <<
"(" << nbok <<
"/" << nb <<
") add " << pt1
<< " Plane=" << plane << std::endl;
bool pt2_inside = plane.extend( pt2 );
++nb; nbok += pt2_inside == true ? 1 : 0;
trace.
info() <<
"(" << nbok <<
"/" << nb <<
") add " << pt2
<< " Plane=" << plane << std::endl;
bool pt3_inside = plane.extend( pt3 );
++nb; nbok += pt3_inside == false ? 1 : 0;
trace.
info() <<
"(" << nbok <<
"/" << nb <<
") add " << pt3
<< " Plane=" << plane << std::endl;
bool pt4_inside = plane.extend( pt4 );
++nb; nbok += pt4_inside == false ? 1 : 0;
trace.
info() <<
"(" << nbok <<
"/" << nb <<
") add " << pt4
<< " Plane=" << plane << std::endl;
bool pt5_inside = plane.extend( pt5 );
++nb; nbok += pt5_inside == true ? 1 : 0;
trace.
info() <<
"(" << nbok <<
"/" << nb <<
") add " << pt5
<< " Plane=" << plane << std::endl;
bool pt6_inside = plane.extend( pt6 );
++nb; nbok += pt6_inside == true ? 1 : 0;
trace.
info() <<
"(" << nbok <<
"/" << nb <<
") add " << pt5
<< " Plane=" << plane << std::endl;
Primitive strip = plane.primitive();
trace.
info() <<
"strip=" << strip
<< " axis=" << strip.mainAxis()
<< " axiswidth=" << strip.axisWidth()
<< " diag=" << strip.mainDiagonal()
<< " diagwidth=" << strip.diagonalWidth()
<< std::endl;
++nb; nbok += strip.axisWidth() < 1.0 ? 1 : 0;
trace.
info() <<
"(" << nbok <<
"/" << nb <<
") axiswidth < 1 " << std::endl;
++nb; nbok += strip.diagonalWidth() < sqrt(3.0) ? 1 : 0;
trace.
info() <<
"(" << nbok <<
"/" << nb <<
") axiswidth < sqrt(3) " << std::endl;
trace.
emphase() << ( nbok == nb ?
"Passed." :
"Error." ) << endl;
MyViewer viewer;
Color green( 0, 255, 0 );
Color grey( 200, 200, 200 );
viewer << MyViewer::updateDisplay;
return application.exec();
}
Aim: A class that contains the chord-based algorithm for recognizing pieces of digital planes of give...
void init(Dimension axis, InternalScalar widthNumerator=NumberTraits< InternalScalar >::ONE, InternalScalar widthDenominator=NumberTraits< InternalScalar >::ONE)
Structure representing an RGB triple with alpha component.
void beginBlock(const std::string &keyword="")
virtual void show()
Overload QWidget method in order to add a call to updateList() method (to ensure that the lists are w...
DGtal is the top-level namespace which contains all DGtal functions and types.
HyperRectDomain< Space > Domain
void displayPredicate(Viewer3D &viewer, const Domain &domain, const Predicate &pred)